Since this value is very close to the calculated one it is unnecessary to check the new value of the angle ß.
At this point we would therefore like to emphasise the fact of the existence of a wide range of L values. The new calculation of ß almost never proves necessary, in fact the small variations in belt length are adjusted by the motor supports, or by the tightener slides.
With this data it is possible to introduce the value of a coefficient C3 which depends on the frequency of the oscillations of the free sections of the belt.
From the relevant table one finds the L value = 1675 mm. C3 = 0.93.
At this stage one consults the table which provides the specific power values (Sp) transmitted by each individual belt for each type of section.
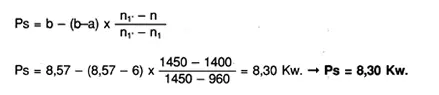
Entering the dp and n1 one finds, by interpolation, the values: Sp = 8.30 Kw as indicated afterwards:
INTERPOLATION
for dp = 180 mm. and n1 = 1450 revs /min for r = 1.4 one chooses Sp = 8.57 Kw (page 30)
for dp = 180 mm. and n1 = 960 revs /min for r = 1.4 one chooses Sp = 6 Kw (page 30)
Indicating with :
Sp = 6 = a; Sp = 8.57 = b; n1 = 960; n1 = 1450; n1 = 1400
the relation which allows the attainment of Sp for n = 1400 revs /min. is given by the formula:
Finally, one may calculate the theoretical number of belts nz
 teorico
teorico
This value is always rounded up nz = 5
IMPORTANT NOTE
Static balancing is recommended for pulleys which do not exceed peripheral speeds of 30 m/sec, with dynamic balancing for those which exceed such values.
In addition, it is imperative to observe, for all pulleys, a maximum hole bore of no greater than 0.625 times the hub diameter; or that which is the same, the hub diameter must be greater or equal to1.6 times the hole diameter.